
الملخص:
تتناول فكرة مشروع التخرج تصميم وتنفيذ ذراع روبوتية على شكل ذراع روبوتية، وربطها بمتحكم Arduino. سيتم التحكم في حركة المحركات داخل الذراع باستخدام تقنيات معالجة الصور بواسطة تطبيق برمجي تم بناؤه بلغة البرمجة بايثون. الهدف الرئيسي للمشروع هو تمكين التحكم الدقيق في زوايا الحركة لتحقيق تشابه مع حركة اليد البشرية.
يتيح المشروع استخدامات متعددة، مثل التعامل مع المواد الخطرة للإنسان بشكل فعال وآمن، ومساعدة في حل المشكلات الخطرة مثل تفكيك الألغام. بالإضافة إلى ذلك، يمكن نقل حركة اليد العاملة لتنفيذ أعمال يدوية مثل اللحام، وفي حالة تحقيق دقة مناسبة، يمكن استخدام الروبوت في العمليات الجراحية الطبية عن بعد.
باستخدام مفهوم معالجة الصور، يتيح المشروع تحقيق تفاعل دقيق بين الذراع الروبوتية والتحكم فيها، مما يفتح أفقًا واسعًا لتطبيقات مستقبلية في مجالات متعددة، بما في ذلك الصناعة والطب.
Abstract:
This graduation project revolves around the design and implementation of a robotic arm, connected to an Arduino controller. The movement of motors within the robotic arm will be controlled using image processing techniques through a Python-built software application. The primary objective of the project is to enable precise control of the angles of movement to achieve similarity with human hand motion.
The project offers diverse applications, such as effectively and safely handling hazardous materials, assisting in solving perilous issues like mine dismantling, and potentially transferring the working hand’s motion to execute manual tasks like welding. With the attainment of suitable precision, the robot can also be employed in remote medical surgeries.
Utilizing the concept of image processing, the project facilitates accurate interaction between the robotic arm and its control, opening broad avenues for future applications in various fields, including industry and medicine.
الفكرة الأساسية:
سيتم تصميم وتنفيذ ذراع روبوتية وسيتم وصلها مع متحكم الأردوينو الذي بدوره سيقوم بالتحكم بتشغيل المحركات الموجودة ضمن الذراع الروبوتية عن طريق ادخال قيم زوايا الحركة المطلوبة باستخدام معالجة الصورة عبر تطبيق تم بناؤه باستخدام لغة البرمجة بايثون.
طبعا الفكرة المقترحة انطلقت من أجل التحكم بذراع روبوتية على شكل يد الانسان وهذا مساعد جداً للعديد من الحالات كما هو موضح ضمن الشكل 1‑1-2.

الشكل 1‑2 ذراع روبوتية على شكل اليد البشرية
التعرف على اليد:
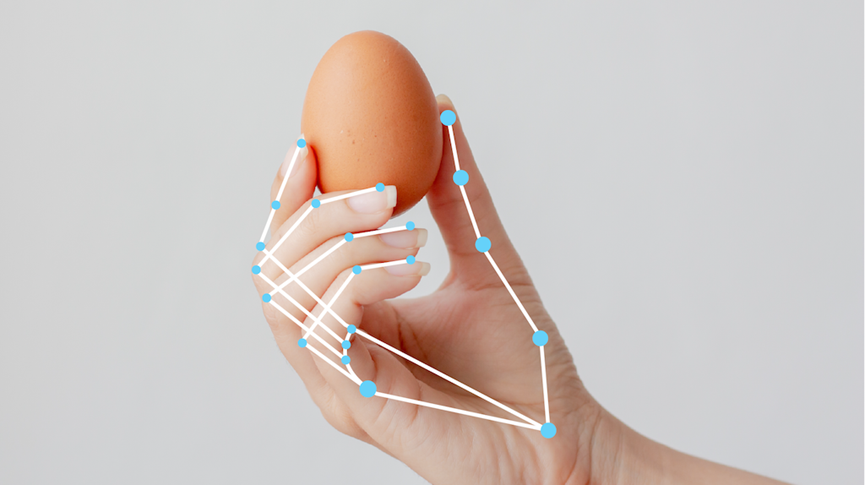
استخدام البايثون في اكتشاف وتتبع اليد يتيح للمطورين إمكانية تطبيق تقنيات معالجة الصور ورؤية الحاسوب لتحديد مواقع وحركات اليد بشكل دقيق. في عمليات اكتشاف اليد باستخدام البايثون، يتم تحديد مجموعة من النقاط على اليد، والنقاط الرئيسية تتبع الهيكل العظمي لليد.
أحد الأساليب الشائعة لاكتشاف اليد باستخدام البايثون هي استخدام مكتبة معالجة الصور OpenCV بالإضافة إلى تقنيات تعلم الآلة (Machine Learning)، مثل تصنيف المراقبة (Convolutional Neural Networks).
صورة المشروع النهائي:
هذا هو شكل التنفيذ العملي النهائي للمشروع:

الشكل 5‑7 الشكل النهائي
التطويرات والآفاق المستقبلية:
- استخدام ذراع روبوتية تشبه اليد البشرية وتنفيذها بنفس المبدأ للمشروع.
- العمليات الطبية عن بعد.
- تخزين ونقل المهن اليدوية وتدريب الروبوتات عليها.
- إضافة ميزات جديدة لتحكم الروبوت عن بعد، مثل الاستجابة للأوامر الصوتية
- تحسين تصميم الروبوت وتجهيزه بالمزيد من الحساسات والأدوات التي تتيح له أداء مهام أكثر تعقيداً وتحدياً.
- تطوير البرمجيات والتطبيقات المستخدمة في التحكم بالروبوت، وذلك لتسهيل عملية التحكم وجعلها أكثر دقة وسلاسة.

